Механизмы управления
К механизмам управления принято относить рулевое управление и тормозную систему. В связи с высокими скоростями движения гоночных автомобилей предъявляют особенно высокие требования в отношении надежности действия механизмов управления, так как от этого зависит безопасность движения.
Рулевое управление
Механизм рулевого управления должен обеспечивать точность поворота колес, давать возможность быстро изменять направление движения и не вызывать большой утомляемости водителя.
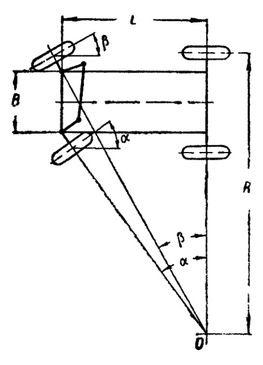 Рис. 92. Схема поворота автомобиля |
На рис. 92 приведена схема поворота автомобиля*. Как видно из этой схемы, поворот автомобиля совершается относительно центра О, лежащего на продолжении задней оси автомобиля.
Для того, чтобы все колеса автомобиля имели при повороте чистое качение без пробуксовки, внутреннее колесо должно поворачиваться на угол α, больший, чем угол β, т. е. угол поворота наружного колеса. Величина углов поворота отдельных колес не остается постоянной, а зависит от радиуса поворота и скорости движения автомобиля.
Необходимое соотношение между углами поворота обоих колес обеспечивается формой рулевой трапеции.
В современных гоночных автомобилях форма трапеции усложняется наличием независимой подвески у передних управляемых колес.
Во всех случаях поворота рулевая трапеция должна обеспечивать определенное соотношение углов, согласно следующему уравнению:
L — база автомобиля, мм.
Рулевые трапеции всех гоночных автомобилей удовлетворяют этому уравнению с небольшими отклонениями углов от их теоретического значения при правом и левом поворотах.
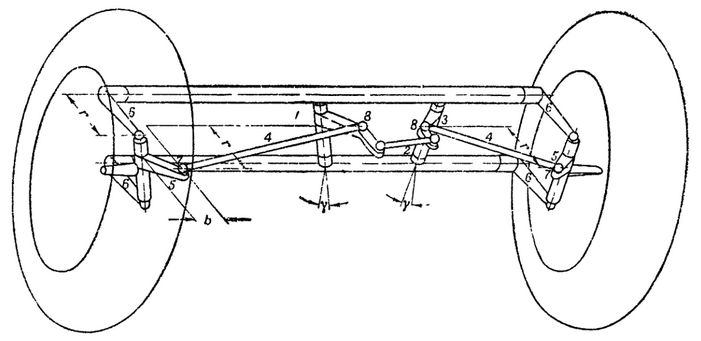 Рис. 93. Схема рулевого привода при независимой подвеске передних колес |
На рис. 93 представлена схема, поясняющая кинематику рулевой трапеции при независимой подвеске передних колес с поперечными стержнями, работающими на скручивание.
Поворот руля передается через рычаг сошки 1 и промежуточные рычаги 2 и 3 на обе поперечные качающиеся штанги 4 и далее на жестко соединенные с поворотными цапфами колес рычаги 5.
При деформациях подвески управляемые передние колеса качаются на продольных рычагах 6 (связанных со стержнями, работающими на скручивание) по дуге радиуса r. Тогда шарнир 7, соединяющий штанги с рычагами 5, будет перемещаться в вертикальной плоскости также по дуге радиуса r. При вертикальных перемещениях шарнира 7 поперечной тяги шарнир 8 на другом ее конце будет неподвижным.
Поперечные штанги, соединяющие шарниры 7 и 8 при любых положениях рычага сошки 1, должны во избежание нарушения геометрии рулевой трапеции и толчков при работе перемещаться по поверхности конуса с радиусом основания r и вершиной, лежащей в точке, соответствующей шарниру 8. Такого перемещения можно достигнуть при данной схеме в том случае, если при повороте перемещению шарнира 7 у колеса будет соответствовать такое же перемещение шарнира 8.
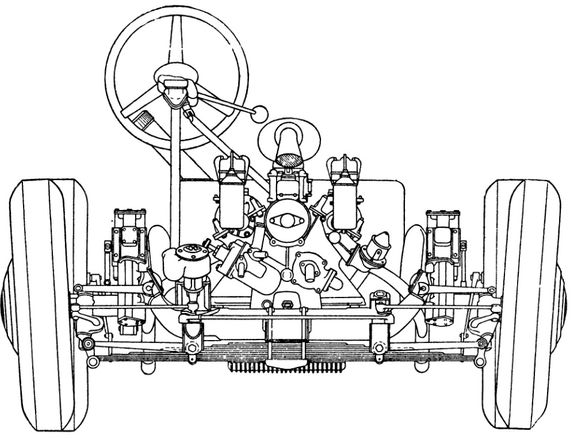 Рис. 94. Привод рулевого управления при независимой подвеске с поперечной рессорой |
Осуществление подобной кинематической схемы рулевого привода требует, чтобы каждая поперечная, качающаяся штанга приводилась в движение отдельным рычагом. Поэтому, помимо основного рычага сошки 1, вводится промежуточный рычаг 3. Ось рычага сошки располагается вертикально, а картер рулевого механизма закрепляется жестко в середине передней поперечины рамы. На рис. 94 показан привод рулевого управления при независимой подвеске с поперечной рессорой.
На рис 95 видна установка поперечной штанги рулевого привода на дорожно-гоночном автомобиле со стержневой передней подвеской.
 Рис. 95. Крепление поперечной штанги рулевого привода при независимой подвеске |
Рассмотренная схема обеспечивает точное соотношение угловых перемещений обоих колес и плавную работу рулевого управления.
На гоночных автомобилях применяют различные типы рулевых механизмов — обычно типа винт-гайка. Передаточное отношение выбирают относительно небольшое, чтобы управление было более чувствительным, так как быстрое изменение обстановки во время скоростных соревнований требует быстрого изменения направления движения автомобиля.
С этой же целью рулевое управление гоночного автомобиля должно быть обратимым. Необратимость руля и наличие в рулевом механизме относительно больших зазоров уменьшают чувствительность рулевого управления и лишают водителя ощущения дороги, необходимого при движении с большой скоростью.
Специальные тяги рулевого управления делают жесткими; обычно применяемые в шарнирных сочленениях пружины или какие-либо другие упругие элементы отсутствуют.
На отечественных гоночных автомобилях, построенных на базе стандартных агрегатов, применяют рулевые управления легковых автомобилей «Москвич» и М-20. На рис. 96 показано крепление рулевого механизма типа М-20 на автомобиле «Дзержинец».
 Рис. 96. Крепление рулевого механизма типа М-20 на автомобиле «Дзержинец» |
Наилучшие результаты дает рулевое управление типа М-20 с небольшими переделками. Эти переделки руля заключаются в укорочении рулевой колонки, изготовлении нового рулевого вала из тонкостенной стальной трубы, тщательной проверке и установке минимально допустимых зазоров. Кроме того, применяется съемное устройство рулевого колеса с простым и надежным запорным приспособлением. Съемная конструкция рулевого колеса применена на ряде отечественных гоночных автомобилей.
При отсутствии обратимости измененный руль автомобиля М-20 позволяет обеспечить четкое и точное управление на всех скоростях движения, достигнутых нашими гоночными автомобилями.
Значительное влияние на работу рулевого управления оказывает боковой увод колес, тем больший, чем больше боковая эластичность шин. Исследования, проведенные Автомобильной лабораторией Академии наук СССР под руководством академика Е. А. Чудакова, показали, что при боковом уводе колес смещается центр поворота автомобиля, что нарушает точность управления автомобилем.
В связи с этим на гоночных автомобилях применяют шины с наименьшей боковой эластичностью.
При установке шин обычного типа следует помнить, что они должны иметь достаточно высокое внутреннее давление, уменьшающее явление бокового увода колес.
* Без учета боковой эластичности шин.
| ← Предыдущая страница | оглавление | Следующая страница → |

